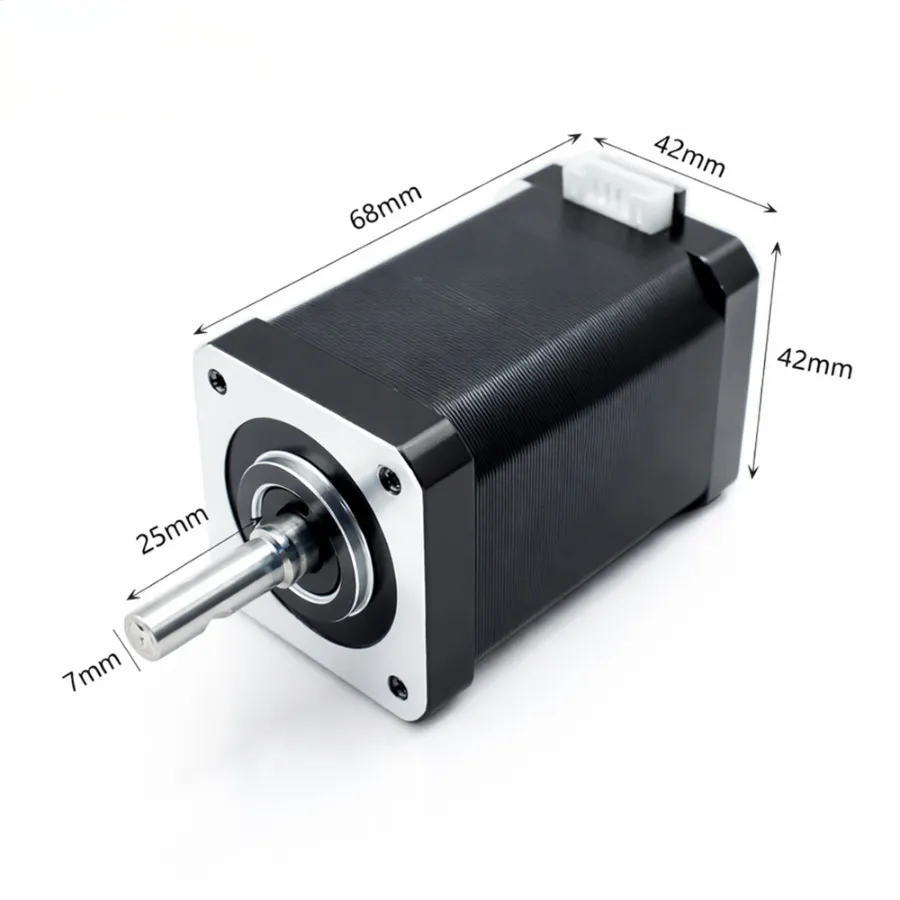
NEMA 17 Stepper Motor
Stainless steel shaft with enhanced radial load capacity for overhung loads
Precision ball bearings and sinusoidal drive lower audible noise
High torque-to-inertia ratio for rapid start-stop cycles
True NEMA 17 (42mm) flange with M3 holes, designed for 12–24 V DC driver supply
Class B insulation supports continuous duty without overheating
Integrates with lead screws, gearboxes, linear slides, and closed-loop encoders
Kechen Motor – NEMA 17 Stepper Motor Manufacturer in China
A NEMA 17 stepper motor is a 42mm x 42mm frame two‑phase hybrid stepping motor that converts electrical pulses into precise mechanical movement. It is widely used where position control, holding torque, and repeatability matter – without needing expensive servo systems.
We offer full customization: single or double shafts, lead screw integration, and gearhead options including planetary gearboxes, worm gearboxes, and parallel shaft gearboxes. Adding a gearbox does two things: it multiplies the output torque (by the reduction ratio, minus efficiency loss), and it reduces the output step angle – for example, a 1.8° motor with a 10:1 planetary gearbox gives you a 0.18° output step angle, meaning significantly higher positioning resolution.
For wiring, we provide 4‑lead (for bipolar drives) or 6‑lead (compatible with both bipolar and unipolar drives) – all our motors are two‑phase designs. Insulation class goes up to Class F. Our motors are built with high‑grade silicon steel laminations and low‑vibration bearings. Typical holding torque ranges from 20 N.cm to 55 N.cm (motor alone); with a gearbox, output torque can reach several N·m depending on the ratio.
| Parameter | NEMA 17 Stepper Motor Series |
|---|---|
| Motor Type | 2‑Phase Hybrid Stepper Motor (1.8° standard, 0.9° available for higher resolution) |
| Frame Size | NEMA 17 (42 mm square mounting face, 42 mm x 42 mm body) |
| Holding Torque Range | 20 – 55 N·cm (0.2 – 0.55 N·m) motor alone; with gearbox, up to several N·m depending on ratio |
| Phase Current | 0.5 – 2.5 A per phase (customizable by winding) |
| Step Angle (Motor) | 1.8° (200 steps/rev) or 0.9° (400 steps/rev) – both two‑phase |
| Step Accuracy | ±5% (non‑cumulative, full‑step no load) |
| Insulation Class | Class B (130°C) – standard; Class F (155°C) available on request |
| Operating Temperature | ‑20 °C to +50 °C (extended range available for special applications) |
| Wiring Options | 4‑lead (bipolar only) or 6‑lead (compatible with both bipolar and unipolar drives) |
| Gearbox Options (Pre‑assembled) | Planetary gearbox, worm gearbox, parallel shaft gearbox – multiple reduction ratios available |
| Output Step Angle (with Gearbox) | Reduced by the gearbox ratio – e.g., 10:1 planetary gives 0.18° output step (2,000 steps/rev) |
| Shaft Options | Single shaft (standard), double shaft, lead screw integrated, key‑flat or custom machining |
| Protection / IP Rating | IP40 (standard) |
| Driver Compatibility | Compatible with 2‑phase bipolar stepper drivers |
Kechen NEMA 17 Stepper Motor Products
Kechen NEMA 17 Stepper Motor 3D Design
Why NEMA 17 Stepper Motors Are the Reliable Choice for OEMs and System Integrators
NEMA 17 stepper motors deliver predictable torque without complicated tuning. The standard 1.8° step angle provides 200 steps per revolution – sufficient for most positioning tasks. For smoother low‑speed motion, the 0.9° version (400 steps/rev) is available.
Real‑world performance matters for industrial buyers. A quality NEMA 17 runs quietly between 300 and 600 rpm. Rattling or lost steps usually point to driver current settings, but can also indicate poor lamination quality or low‑grade bearings. That is why our motors use Japanese‑grade bearings and vacuum‑impregnated windings. Temperature rise stays within 65K at rated current, preventing overheating of driver enclosures.
Customization options cover a wide range: special shaft flats, specific connectors (JST, Molex, or flying leads), rear shafts for manual knobs or encoders, different windings, and cable lengths. Our NEMA 17 motors have been supplied for automated lab pipettors, solar tracker actuators, and textile machines.
Adding a magnetic encoder turns the motor into a closed‑loop system – still more cost‑effective than a full servo.
Common Applications and How to Choose the Right NEMA 17 for Your Project
Typical applications for NEMA 17 motors include:
- 3D printers (Ender 3, Prusa‑style) – 40mm stack, 1.5A – 2.0A
- Desktop CNC mills – 48mm stack, higher torque for lead screws
- Pick‑and‑place machines – 0.9° version for fine positioning
- Medical syringe pumps – low‑current version to avoid overheating
- Automated gate openers – with planetary gearbox
When choosing, don’t just look at the holding torque number. Pay attention to the torque‑speed curve – a motor that drops torque quickly above 400 rpm is useless for fast applications. Also match the rated current to your driver; running a 2.5A motor on a 1.5A driver will leave half the torque on the table.
Pro tip: For most industrial gear, run the motor at 24V or 36V with a microstepping driver (1/8 or 1/16 step). You’ll get smoother motion and higher usable torque. And always add a few spare motors to your BOM – they’re small, cheap, and can save weeks of downtime.